近年、さまざまな領域での活用が期待されているAI。すでに数字やデータの処理能力などでは人間をはるかに超えているものの、物理空間の労働力を補えるレベルではない。いずれこのような身体的な労働を代替するには、「ロボットAI」の発展が不可欠だ。そこでパナソニック コネクトでは、人間の言語指示に対してロボットが自律的に制御を行う枠組みを提案できるようにするための研究開発を進めているという。今回、この取り組みをリードする同社の黄瀬輝に、これからのロボットAIの可能性や研究者としての思いを聞いた。
ロボットAIは、まだまだ人間には遠く及ばない?
──黄瀬さんの現在のお仕事や研究対象について教えてください。
黄瀬:技術研究開発本部の知能システム研究所というところで、ロボット制御のための知能や、大規模言語モデルを使った現場ノウハウの形式知化と知識処理を研究しています。アカデミックな領域で行われている研究を集めて自分たちなりに技術に落とし込み、それを開発部隊や事業部に引き渡す、という役割です。
──専門的な領域を研究するうえで、大学などではなくパナソニック コネクトという企業を選択したのはなぜでしょうか?
黄瀬:個人的にもかなり悩んだのですが、ロボットAIをもっと身近なものにできると良いなと考え、社会実装がしやすい「企業」という立場から研究を進めることを選びました。自分の手足の代わりにロボットを使えるようになれば、仕事や家事の負担を減らしたり、ハンディキャップを埋めたりできるかもしれません。そんな「最先端の技術を応用することで誰もがサポートを受けられる世界」を実現しやすい環境だと思ったんです。
企業研究はその成果を自社のビジネスへつなげるための活動です。新製品やサービスなどを実用化へ導くために、比較的短い期間で研究成果を出していくという特徴があります。研究に関わる人数も多く、チームや部署で動くことがほとんどなのでスピード感がありますね。

黄瀬:個人的な思いとして、「ロボットAIを、最も完成した知能である“人間”に近づけたい」という野望があります。私にとってロボットAIの研究は、「人間のように高度な知能を持ったロボットは実現可能なのか?」をたしかめる実験なんです。新しい技術が生まれるたびに、こんな応用ができるんじゃないかとワクワクしますね。
──壮大ですね。ただ、昨年から話題になっているChatGPTなど、すでに人間の知能を超えつつあるようにも思えますが……。
黄瀬:言語や図像などの情報処理に限定すれば、AIはたしかに個々の人間を超えているかもしれません。しかし実空間での挙動に関しては、AIはまだまだ人間には遠く及びません。
とくに、物理空間のなかで臨機応変に作業するという点において、「人間」の能力があまりにも高すぎるのです。ロボットが膨大な学習を経てやっと実現できる挙動を、人はいとも簡単にこなしてしまいます。また、コスト面でも、高度な労働力をもつ「人間」と比較したときに、現段階ではロボットAIの方が圧倒的に高コストなんです。
──意外な視点で興味深いです。現状では、人間の方が労働力として優秀かつ安価である、と。
黄瀬:ロボットAIを自律的に動かすには、まずその現場の環境を数日がかりで学習させる必要があります。また、環境が変わると再学習が必要で、そのたびに時間的・金銭的なコストがかかるのです。
しかし、逆に考えれば、人間のコストが相対的に高くなるような状況においては、ロボットAIの優位性が高まります。たとえば、宇宙や高地、深海などの危険な場所や災害現場での作業については、高価なロボットでも採算が合うケースもありそうです。

LLMで研究の前提が変わり、可能性が広がった
──黄瀬さんが進めている研究では、大規模言語モデル(Large Language Models、通称LLM)と世界モデルを組み合わせてロボットを動かすシステムを開発したとのことですが、近年の「ChatGPT」などのLLMの発展は、AI関連技術の可能性を広げたのでしょうか。
黄瀬:LLMが生まれる前と後とでは、ロボットAIの研究はまったく異なるものになっています。従来のロボット制御では、命令をすべてコードによってプログラムする必要がありました。人間が書き下したコードを通じてさまざまなAPIを呼び出したり、AIを統御する上位のシステムを構築したりといった形で、いくつかの手段を組み合わせながら複雑な挙動を実現していたのです。
しかし、LLMが登場したことによって、例えば自然言語で与えた命令をAIに解釈させ、命令を実行するためのコードを自動生成する、などが可能になりました。ロボット自身が状況に応じて必要な動作を生み出せるようになったのです。
──簡単な命令を言葉で与えただけで、それを達成するための方法をロボット自身が考えて動いてくれるようになった、と。
黄瀬:そんなイメージです。ただ、自然言語の命令でロボットを動かせることもたしかにすごいのですが、ポイントはそこではありません。
重要なのは、従来バラバラに存在していた機能や挙動を、LLMというプラットフォームでひとつに統合できるようになったことです。これまでは、対象を認識するためには画像認識のコード、腕を動かすためにはロボット制御のコードといったように、ロボットを動かす技術はそれぞれ別の分野で生み出されており、知見がなければそれらを自由に使うことは困難でした。
しかしLLMが登場してからは、AIがその紐付けを自動で行うことができるため、誰もがシンプルな命令で複数の機能を活用できるようになってきました。

──まさにロボットの手足や器官をまとめる「知能」の役割をAIが果たしているんですね。何か変化を実感したエピソードはありますか?
黄瀬:今年の「ロボカップ@ホーム(※1)」というロボット競技大会が印象的でした。この大会は、私も学生時代に参加していたのですが、今年の大会で東京大学のチームが初めてLLMを活用して臨んだんです。
そのチームはほとんど学部生で構成されたチームであったにもかかわらず、なんと全競技で大差をつけて優勝しました。他のチームのように複雑な機能や命令を用意せずとも、簡単な命令だけで日常的なタスクを高精度にこなしてしまったのです。
※1:ロボットが日常生活でのタスクをどれだけスムーズにできるかを競う大会。たとえば、「喉が渇いた」といった命令がお題として想定され、各チームは早く正確に要望を叶えられるロボットを開発するべく、さまざまな認識技術や制御技術を駆使する。
──それは驚きですね! 黄瀬さんとしては複雑な思いもあったのでしょうか。
黄瀬:ロボット競技の前提をがらりと変えてしまう出来事でしたし、「今までやってきたことは何だったのか」という気持ちももちろんなくはなかったです。ただ、「ロボットでできることがさらに広がるぞ」というワクワクも大きかったですね。未開拓な領域なので当分やることには困らないですし、ある意味みんなスタートラインは一緒なわけです。他の人よりも先に面白いアイデアを思いつかなければと燃えましたね。
大胆に発想し、手を動かし、どんどん失敗を重ねる
──ここからは黄瀬さんが進めているロボットAI研究について、さらに詳しく伺えればと思います。本研究の概要を教えてください。
黄瀬:命令を解釈して適切な機能を呼び出すLLMと、物理空間での挙動を予測して動作を決定する世界モデル。これらふたつの技術を組み合わせることで、自然言語での命令による柔軟な挙動を実現するというのが、私たちのロボットAI研究の主眼です。
例として、「カゴの中に青い缶を入れてください」という簡単な命令を想定してみましょう。こうしたタスクは一般的に「認識」と「制御」に分解できます。まず、缶の種類や色を「認識」し、缶を掴んでカゴの中に入れるために腕を「制御」するという流れです。
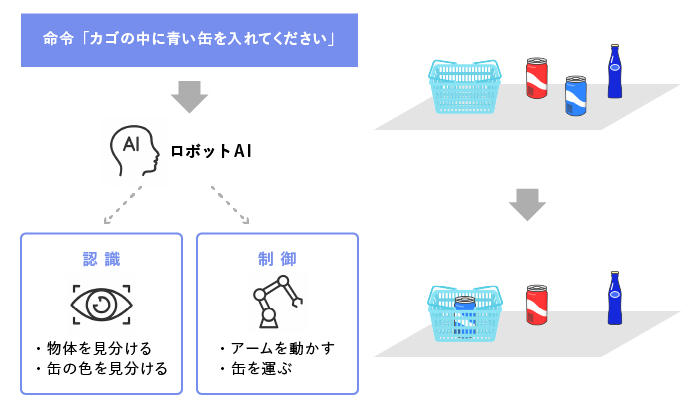
黄瀬:このうち認識の方は、画像認識などを用いて箱の大きさや色を特定できれば十分なので大きな課題ではありません。問題は制御です。「アームをどのように動かせば目的を達成できるのか」は状況によって大きく変わりますし、かといってすべての状況を網羅して命令するわけにはいきません。ロボット自身が状況を判断し、適切な動きを生み出さなければなりません。
そこで導入されたのが「世界モデル」という、LLMとはまた異なる強化学習の技術です。簡単にいえば、ロボットに大量の画像情報の変化を学習させ、「世界がどのような法則で成り立っているのか」についての予測を持たせることができます。
これによってロボットは、「アームをこう動かせば、この物体はこのように動くはずだ」という予測をして、目的達成のための動作を自ら生み出せるようになります。また、多少状況が変わったとしても、その度に予測を修正しながら柔軟に対応していけるのです。

──本研究の活用が期待されそうな現場は、どういったところなのでしょうか。
黄瀬:コネクトの事業でいえば、サプライチェーンの現場である物流や流通ですね。現場で活躍しているロボットを制御するAIとして役立てることが第一の目標です。これらの領域では、すでにロボットの活用は進んでいますが、人間でなければできない作業もまだたくさん残っています。
たとえば「他の荷物をどかして、目当てのものをピックアップする」といった、人間であれば難なくできる動作も、現状のロボットで実現しようとすると大変な手間がかかってしまいます。AIの力を使ってこれを形にしようというのが、私たちの研究の目的です。工場や倉庫でピッキングを行うロボットを、より抽象的な命令で動かせるようになれば、ラインをさらに効率化できるかもしれません。ここはわかりやすく期待できる領域ですね。
また、AIやLLMの応用可能性はロボットだけに留まりません。直近の自分の活動としても、現場のノウハウなどの暗黙知をデータベース化して、属人的になっている情報にすべての人がアクセスできるLLMベースのチャットボットの研究を進めています。ロボットAIの開発を進めながら、そこで得た知見をこうした他の活用先にフィードバックすることで、全社レベルで業務効率化に貢献していければと考えています。
──今後、ロボットAIを実用化していくために、パナソニック コネクトが取り組んでいることについて教えてください。
黄瀬:今は「とりあえず動く」程度の小さな試作品をスピーディに開発し、各事業部で試してもらうことが重要だと考えています。私たちが考えている以上の応用可能性が眠っているかもしれませんし、現場の方々にしかわからない用途や利用価値もあるでしょう。
また、試作品を開発する際に用いたソースコードをオープンにして、技術者の方々がいつでも使える状態にしておくことも大事です。ロボットAIの完全な実用化は当分先になるので、その途中経過をなるべく共有財産として活用していければと思っています。そこで得られるフィードバックは、研究を発展させるうえでも貴重なものになるはずです。
──チームで研究開発ができる強みが活かせそうですね。
黄瀬:はい。まさに現在所属しているR&D部門のスローガンである「Think Big, Act First and Fail Fast, Repeat above till success」のマインドにも重なるスタンスです。大胆に発想し、手を動かし、どんどん失敗を重ねる。この姿勢を部署として共有できているのは、先端研究を推し進めるうえで大きな強みだと感じています。この恵まれた環境で、これからも研究者として最大限の力を発揮しながら、ロボットAIの可能性を探求していきたいですね。

