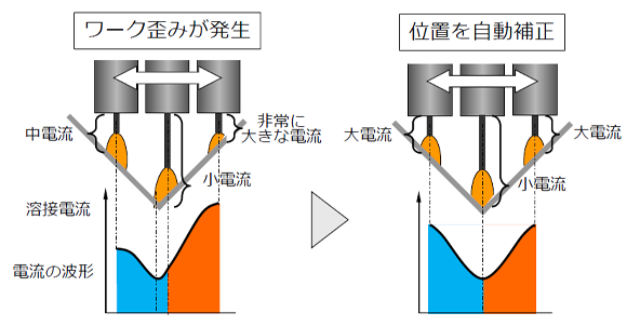
実際のワークと教示点のずれ量を検出し、設定された教示点に対してずれ量に応じた補正をかける機能です。
トーチ先端から出ているワイヤに電気を流し、そのワイヤが溶接対象物に接触することで通電し、位置情報を記憶します。これによりワーク精度による溶接個所のズレ(変位)に対し、都度のティーチング修正対応をせずに溶接が可能です。
既設ロボットへの機能追加には、各種ハード・ソフトウェアの追加が必要です。
※変位が著しく少ない突合せ継ぎ手や、水平方向以外にねじれがあるワークでは使用できません。導入前には一度実証実験をお申し込みください。

様々な継ぎ手形状におけるずれの補正
すみ肉形状だけでなく、開先(V型やレ型)の検出や、水平面上の回転方向のずれを補正することが可能です。
治具の位置ずれや、ワーク精度のばらつきにより都度のティーチング修正に時間がかかる場合、開先形状の継ぎ手が多い中板~厚板ワークの自動化に対し効果を発揮します。
※開先の検出には開先タッチセンサーのオプションが必要です。

ティーチング修正工数削減
事前のプログラム設定により、ロボットが変化量を自動算出するため、都度のティーチング修正が不要です。
これにより、作業工数を削減し、生産性の向上が期待できます。

目視検査工程の削減
部品が付属するワークにおいて、タッチセンサー機能を用いて施工前に部品のありなしを判別することも可能です。これにより、部品がセットされているかといった事前の目視検査工程や部品のセット忘れによる溶接手直し作業を削減できます。

DTPS IIIとの組み合わせでティーチング工数をさらに削減
オフラインティーチングソフト「DTPSⅢ」との組み合わせでさらなるティーチング工数の削減と設備立ち上げまでの時間短縮が可能です。
ノウハウが必要な教示作業を簡略化することで全体の作業効率向上に貢献します。
ワークの熱歪みによる変形(=溶接線の変化)を検知し、ロボットの動作を溶接線の変化に追従させるための機能です。


ワークの熱歪みによる変形(=溶接線の変化)を検知し、ロボットの動作を溶接線の変化に追従させるための機能です。
開催予定のセミナーや展示会情報をまとめて掲載しています。
また、過去のセミナーや展示会情報もご覧になれます。


溶接のスペシャリストが溶接に関するお悩みに対し、実ワークで施工提案いたします。

パナソニックは全世界のお客様を支援する体制を整えております。日本から海外の工場へ生産展開するお客様も安心して当社設備をご使用いただけます。

パナソニック松溶会に加盟している方向けの特設ページです。
会員サイトP-Webへの申請書をダウンロードすることができます。
